L’actionneur rotatif et linéaire électrique (ERLA), pour vos applications
sous-marines

L’actionneur rotatif et linéaire électrique (ERLA) est un actionneur servo-rotatif et linéaire avec électronique intégrée, conçu pour opérer dans les environnements les plus exigeants.
FORCE
Capacité de poussée
jusqu’à 80kg
COUPLE & VITESSE DE ROTATION
16 N.m (max) et 8 secondes pour un tour complet (360°)
PROFONDEUR
Immergeable jusqu’à
600 mètres de profondeur
ROBUSTESSE
Moins de maintenance,
plus fiable


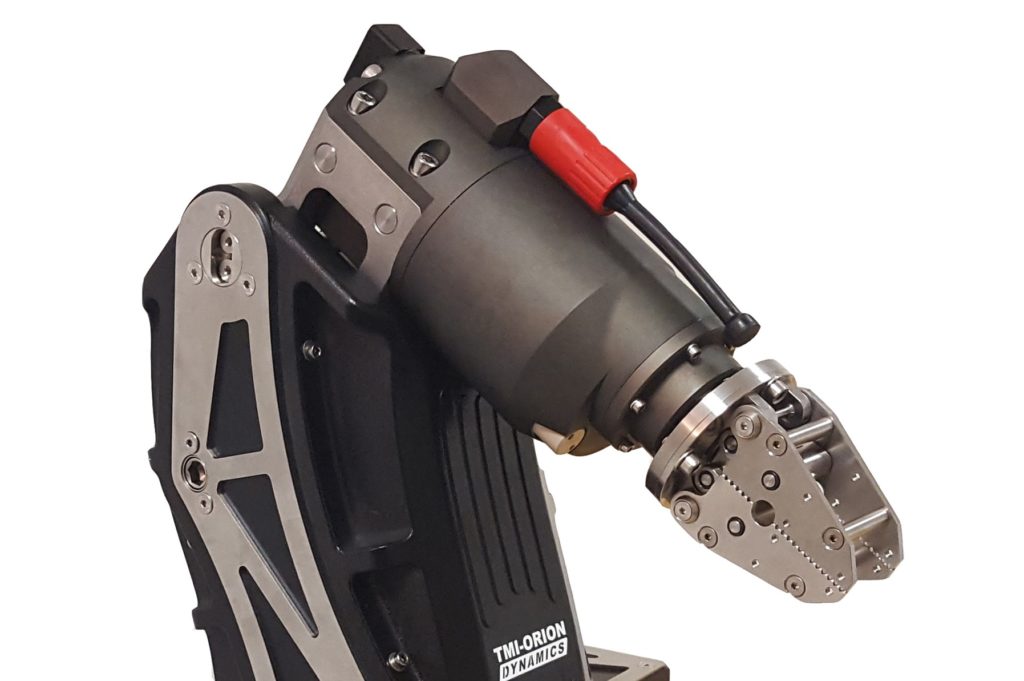
L’Actionneur rotatif et linéaire électrique (ERLA) est un actionneur électrique sous-marin combinant mouvement rotatif et mouvement linéaire dans un format compact et robuste. Conçu pour les environnements subaquatiques jusqu’à 600 mètres de profondeur, il garantit précision, force d’actionnement et retour de position en temps réel.
Polyvalent et modulaire, l’ERLA s’intègre facilement aux robots sous-marins (ROV, AUV) ou autres plateformes pour des applications variées : manipulation d’objets, prélèvements, ajustements de structures ou outillages embarqués.
Comme pour notre bras robotique EMA 5 Fonctions, l’ERLA peut être équipé de différents outils comme des pinces interchangeables (T-Bar, parallèle, grabber, coupante, etc.). Dans ce cas, le mouvement linéaire permet l’ouverture et la fermeture de la pince, tandis que le mouvement rotatif permet de la faire pivoter pour une meilleure orientation.
Ce n’est là qu’un exemple : l’ERLA est une solution modulaire qui s’adapte à de nombreuses applications selon vos besoins spécifiques.
Des actionneurs conçus pour s’adapter à vos besoins spécifiques :
Chaque application industrielle ou sous-marine présente des exigences techniques particulières. C’est pourquoi nous développons des solutions personnalisées, conçues en étroite collaboration avec vos équipes.
Notre bureau d’études vous accompagne à chaque étape : de l’analyse de vos contraintes jusqu’à la conception d’actionneurs sur-mesure parfaitement adaptés à votre environnement, vos performances cibles et vos contraintes d’intégration.
Personnalisez votre solution selon plusieurs critères :
- Vitesse de déplacement / rotation
- Force appliquée / couple
- Course
- Profondeur
- Type de connecteurs
- Terminaison mécanique
Vous avez un besoin spécifique ? Parlons-en !
Nous co-construisons avec vous la solution idéale.
Caractéristiques
- Conçu pour les opérations qui exigent une maîtrise précise des déplacements et de la rotation.
- Retour de position en mode vitesse et en mode position.

- 1 connecteur dispponible pour une capacité d’extension (actionneur supplémentaire, caméra, projecteur…).
- Avec contrôleur électronique intégré (aucun module externe requis).
- Polyvalent et facile à intégrer.
L’ERLA intègre un contrôleur embarqué offrant :
- Commandes de position ou de vitesse programmables
- Retour de position en temps réel
- Pilotage précis et fluide, même en conditions extrêmes
Connectivité modulaire :
Son connecteur additionnel permet :
- l’ajout d’équipements externes (caméras, capteurs, projecteurs, sonar, etc.)
- le chaînage avec d’autres actionneurs (ELA, ERA, ERLA) pour constituer des systèmesinterconnectés et évolutifs.
Téléchargez nos fiches produits
Retrouvez toutes les caractéristiques techniques de nos produits en consultant les fiches détaillées
disponibles ci-dessous.
Chaque version y est présentée avec ses spécificités pour vous aider à faire le bon choix.
Besoin d’aide ou d’un accompagnement personnalisé ?
Notre équipe est à votre écoute pour répondre à vos questions.
Facilité d’intégration
- Intégration rapide dans les différents systèmes sous-marins
- Ultra-compact avec un excellent rapport puissance/encombrement
- Une équipe présente pour vous guider
Idéal pour une large gamme d’applications sous-marines, l’ERLA est le sous-système parfait :
Le logiciel Actuator Commander
L’ERLA est livré avec un logiciel de contrôle à distance intuitif :
Actuator Commander (compatible Windows®).
- paramétrage simple,
- suivi en direct,
- diagnostic rapide du système.



